
CTV-Dataset
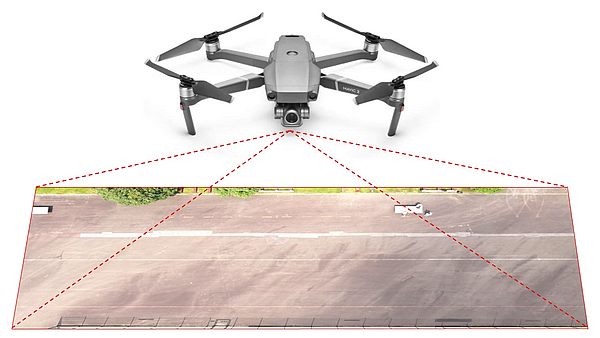
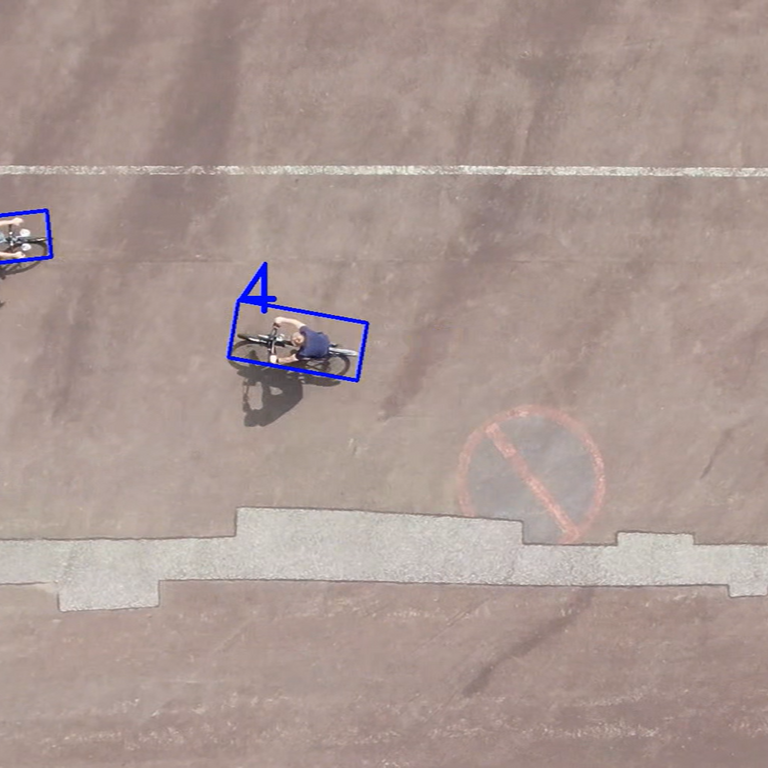
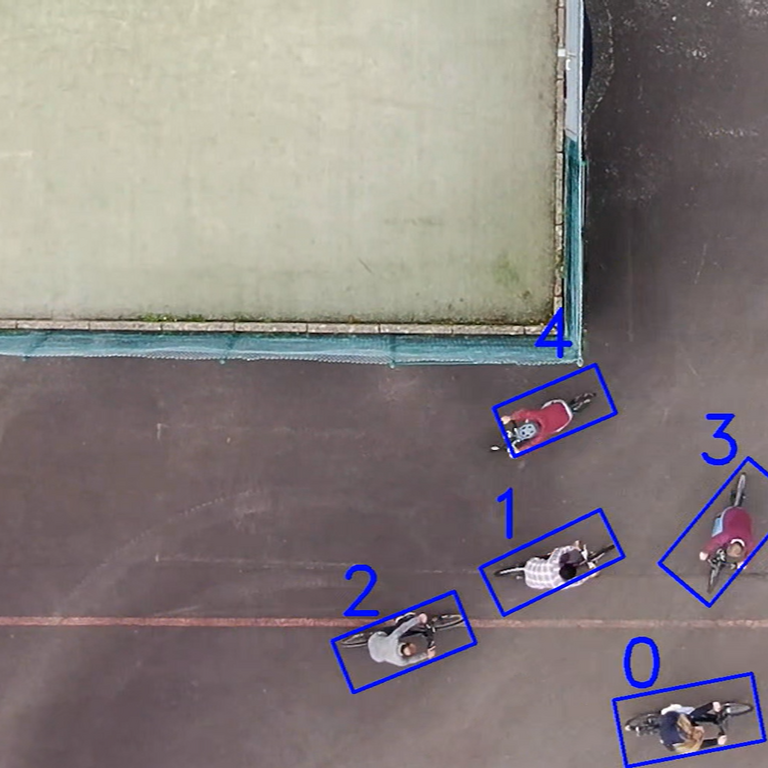
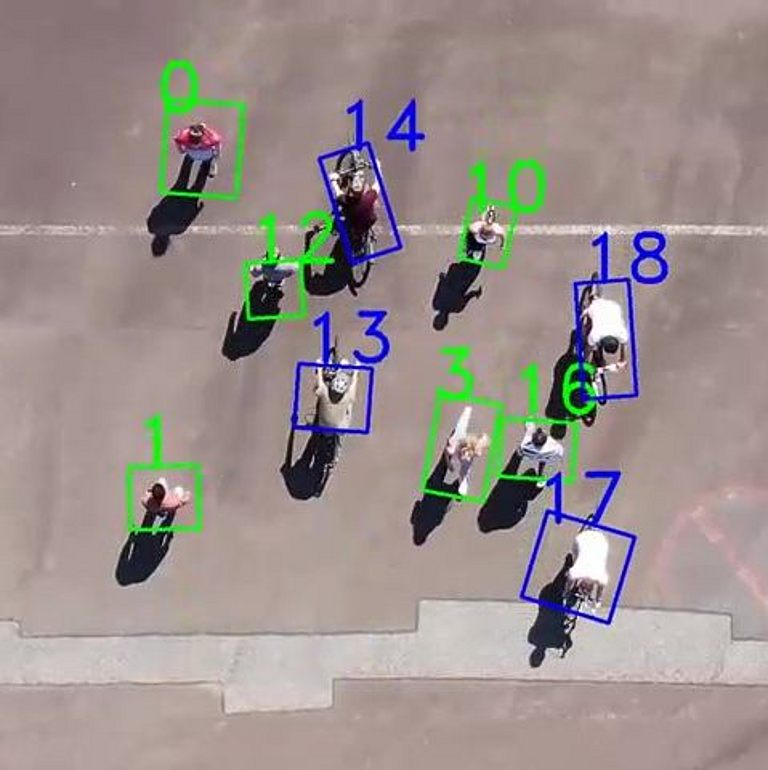
The CTV-Dataset (CTV stands for Cyclist Top-View) is a trajectories dataset for cyclist behaviour in mixed-traffic environments (aka. shared spaces). This dataset is meant to enlarge the available datasets in the community, focusing on cyclists as main road users to help the research in understanding and predicting cyclist behaviour in shared spaces. The dataset results from an experiment conducted in TU Clausthal to extract data from possible interaction scenarios with other road users, such as pedestrians and cars, in shared spaces. The scenarios were captured using a drone with 4K (3840×2160) resolution at 29.97 fps to ensure high-quality results. The trajectories were extracted using an in-house developed computer vision algorithm.
Location
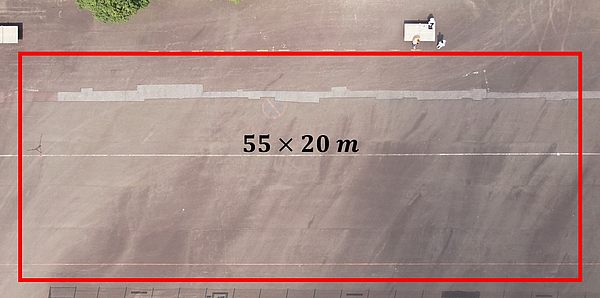
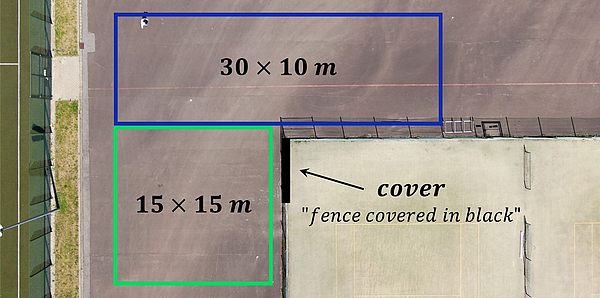
The experiment occurred in the sports institute’s backyard, the site was flat asphalt and seemed appropriate for cycling and also to be used as a shared area. We experimented in two different areas: Area I) rectangle layout with approximately 55 × 20 meters, and Area II) L-shape layout with approximately 30 × 10 and 15 × 15 meters, as shown in the above figures.
Specifications
The CTV-Dataset has a collection of scenarios for cyclist interactions with other road users; cyclists, pedestrians, and cars. The collected recordings are filtered, processed, and the trajectories were extracted using the OfflineMOT algorithm. The scenarios groups are categorized as follows:
- Cyclist free-flow movement
- Cyclist-pedestrian interaction
- Cyclist-cyclist interaction
- Cyclist-car interaction
- Corner interaction (with obstructed line of sight)
- Cyclist-pedestrian on dirt interaction
Each scenario group consists of different formulations. Here are the overall stats:
| Total duration | 1.68hrs (101 minutes) of pure scenarios |
| No. of clips | 593 |
| Total no. of Trajectories | 4078 |
The description of the experiment and the specification of the dataset are published in the 26th IEEE ITSC 2023 conference, you can find the paper here. Please cite the dataset using the following paper reference:
@INPROCEEDINGS{Mukbil+2023itsc,
author={Mukbil, Awad and Yousif, Yasin and Hossain, Sakif and Müller, Jörg P.},
booktitle={2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC)},
title={CTV-Dataset: A Shared Space Drone Dataset for Cyclist-Road User Interaction Derived from Campus Experiments},
year={2023},
volume={},
number={},
pages={3186-3191},
keywords={Tracking;Roads;Europe;Trajectory;Safety;Drones;Videos},
doi={10.1109/ITSC57777.2023.10422465}
}
The dataset is currently updated! please contact the author. Thank you!
CTV-Dataset v1.0
We have included the videos in the 2nd version of the dataset, therefore we encourage to use the 2nd version.
CTV-Dataset V2.0
Major improvements:
- The 4K videos and the appending trajectories from the 1st version have been first stabilized
- All scenarios are brought back and separated by the recording area
- Videos from different positions/heights are mapped to a common reference viewpoint
- Finally the resulting trajectories are transformed into meters
This version of the dataset has two different formats:
- 4K Videos: similar to v1.0. but stabilized videos
- Transformed trajectories: all scenario trajectories, transformed in meters, for the two areas + background image in FHD resolution
Click here to download CTV-Dataset v2.0!
Acknowledgment
We would like to thank Merlin Korth for labeling the training set and Gustav Baier, the drone pilot. Also, thanks to university members who volunteered in the experiment, and the Sports Institute members for their support in experimenting on the university campus.
01.06.2025:
Welcome to Dr. Vinu Kamalasanan in our team. Dr. Kamalasanan has mainly contributed in the CTV-Dataset v2.0, specifically in mapping the trajectories into a common reference pointview and transforming the trajectories in meters.
Our Team

Yasin Yousif, M.Sc.
Sakif Hossain, M.Sc.

